生産技術
全社のものづくりを
支える生産技術。
生産技術開発の概要
地球上でもっとも大きな乗り物と言われる船を造るためには、様々な生産技術が必要です。
鉄板を1枚ずつ切断して約10万個の部材を作り、曲げて形を作り、溶接で接合していきます。 5階建てビルにも相当する大きなエンジンやプロペラなどを搭載し、それらをつなぐパイプや電線、船内で人が活動するための足場や手すり、はしごなどを取り付けます。 人間に例えると臓器や血管、神経に当たるものを組み込むことで、船に魂を吹き込むのです。
造船所には、小さな部品から大きな機器までを正確に組み合わせ、効率よく作るための大型の設備や卓越した技術・技能が集結しています。 そしてより品質の高い船を効率よく造るため、これらの探求には終わりはありません。
ピックアップ
JMUは生産技術の自動化を推進しています。 ロボットを自社で開発していることも強みの一つです。 これまでの小組部材やブロックの組立工程に適用される溶接ロボットに加え、最近では人が持ち運べて溶接する箇所を自動で認識できる小型可搬式のロボットも独自に開発しました。 これによりロボット溶接の適用が困難であった閉所や狭隘箇所の自動化が可能になりました。
また、造船現場のデジタルトランスフォーメーション(DX)を実現するため、ICTやIoTを活用。 精度・品質を含む造船現場の様々な生産に関する情報をモニタリングする技術の開発にも力を入れています。 各造船所に設置されている数百台の溶接機の稼働状況をモニタリングし、収集されたビッグデータを活用して溶接作業の効率化につなげています。 毎日計測される数百件の精度データを全社で見える化し、精度管理や機器のメンテナンスに活用しています。
自動化やDXにあたっては、国土交通省が推進する「海事生産性革命(i-Shipping ※)」の支援も活用。 造船工程における生産性向上を目的に、IoTやAI等を活用した革新的な造船技術の研究開発を推進しています。 さらにロボットやモニタリングだけではなく、JMU流の生産方式の確立や人財育成・教育などソフト面からのアプローチにも力を入れています。
※海事生産性革命(i-Shipping): 国土交通省が推進する取り組み。ICT等の活用により造船海運の競争力向上を目指す。
これからの展望
現場がどう進捗しているかを知るために、ICTやIoTの技術を使ったモニタリングの活用に取り組んでいます。
造船所では数千人が働いており、機器のトラブル、部材の精度などにより作業が予定通り進まないことが多々起きます。 また、季節や天候にも左右されます。
そこで、部材の位置や仕上がり度合い、装置の精度や稼働状況、予定通り作業が進んでいるかなど、これまで正確に把握が難しかった様々な情報をモニタリングにより収集して、データ分析をすることで、スムーズに仕事が進められるようにしていきます。
さらに、リモート化が実現できれば、作業環境の改善につなげることができます。 造船所の皆が快適に働けて、日々の達成感も得られる、そんなスマートファクトリーを目指しています。
研究開発の詳細
3D作業指示システム
理解の容易な作業指示で
合理的な建造作業
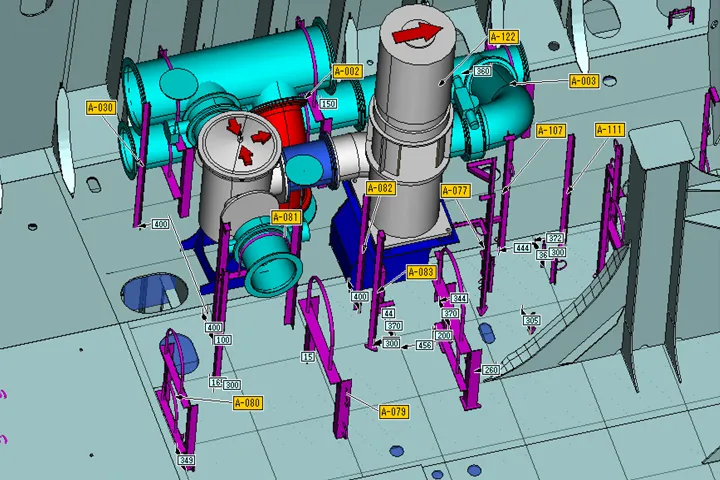
船殻ブロック(※)組立作業での部材組立手順や艤装部品の複雑な取付け作業での合理的な取付け順序や部品取付位置・寸法を、理解の容易な3Dモデル表示機能を駆使して、ノート型PCやスレート型PC画面および紙資料出力で、作業者に作業指示情報の提供を行います。
※船殻ブロック: 一辺20~25mほどの構造の固まりのこと。工場内で製造された船殻ブロックは、ドックへ運ばれ、クレーンで順に搭載されて、大きな船の形になっていきます。
精度管理
3Dブロック計測システム
船の前後部は水の抵抗を小さくするために、3次元の曲面を持った鋼板で構成されています。
曲面を正確に評価するため、3次元レーザスキャナを用いた計測・評価手法を独自に開発しました。 これにより、ブロック全体を詳細な点群データ(※)で表現し、従来の手法では難しかった船体特有の曲面形状まで計測することが可能となりました。 さらに、この計測データと3次元設計CADデータを照合してその差異を修正することにより、正確な船殻ブロック形状を製作することができます。
※点群データ: 一つ一つが3次元座標を持った点情報の集合のこと。
溶接ロボット
小組立溶接ロボット
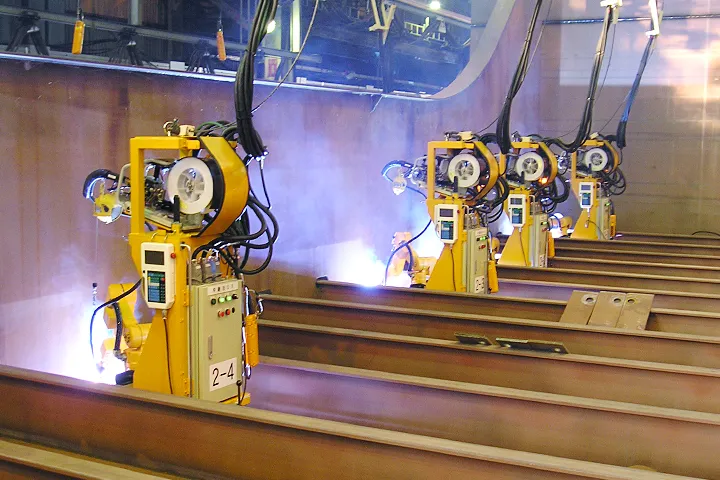
小組立ライン(※1)に導入しているNC溶接ロボットシステムです。
この溶接ロボットは、2台の垂直多関節ロボットを搭載した走行ガーダを4台配置した構成になっており、運転データは当社独自のCAM(※2)システムによりCADデータから自動生成しています。 このCAMシステムにより複数台の溶接ロボットの干渉チェックを行うと同時に、最適な動作生成により効率的な自動溶接を実現しています。
- ※1 小組立ライン: 鋼板から切断された部材を加工する製造ラインのこと。 溶接されて写真のような小さな船体構造部品へと纏まっていきます。
- ※2 CAM: Computer Integrated Manufacturingの略。 CADで定義された図面情報を基に、溶接ロボットの動きを指示するための情報を生成・出力するシステム。

大組立溶接ロボット
大組立ライン(※)に導入している溶接ロボットシステムで、16台の多関節ロボットで構成されています。 運転データは当社独自のCAMシステムで自動生成します。 構造部材が貫通するような複雑な箇所は、これまで人の手で溶接する必要がありましたが、新たに開発した機能により自動化の範囲が広がっています。 良好な溶接品質の確保と生産性向上に貢献しています。
※大組立ライン: 小組立ラインで製造された構造部材をさらに大きな構造部品へと組み立てていくラインのこと。 ここで行われる作業を大組立と呼びます。